

刚刚,特斯拉FSD,完成全球首个完全自动驾驶的横穿美国。从今天起,人类的自动驾驶,到达了全新的里程碑!就在2025年的最后一天,当全世界都在准备倒数跨年时,车主David Moss静悄悄地扔出了一枚深水炸弹——他驾驶搭载FSDV14.2的Model 3,完成了全球首次、经由第三方数据验证的“零接管”横贯美国之旅。

从美国西海岸开到东海岸,2天20小时,人类0次接管。
物理世界的“自动驾驶奇点”,终于降临!
这条Twitter,也彻底引爆了全球科技圈和AI圈。

由此,他也成为全世界第一个全程凭借自动驾驶横穿美国的人。
可以说,这是特斯拉正式通过了公路上的图灵测试。

这场AI主导的公路旅行,直接震撼了全球特斯拉车主。
前特斯拉AI总监Karpathy兴奋高呼:这一刻终于来了,这是端到端神经网络的胜利,这是“软件2.0”在物理世界的完全接管,不再需要人类写下的规则!

特斯拉官方账号,表扬了这次壮举。
一位特斯拉车主赞叹:“我们已步入自动驾驶穿越美洲大陆的时代。”

特斯拉掌门人马斯克,也激动转发莫斯的推文:“酷!”

十年前,马斯克许下“Coast-to-Coast”的诺言,2026年1月1日,终于实现了!
或者真如Karpathy所说:从此,方向盘只是车上的一个装饰品?
全球首次
人类零接管
下面这份数据,让人难以抑制心头的震撼。
总里程:2732.4英里(约等于4397公里)
耗时:2天20小时
软件版本:FSD v14.2
人工接管:0
当特斯拉从v12开始抛弃传统的C++,转向端到端神经网络,AI就从数百万小时的视频中,真正学会了开车。
在这场横跨美国大陆的旅途中,David Moss没有任何一刻,触摸车里的方向盘,或者踩过踏板!
想象一下:坐在驾驶座上,盯着方向盘整整68个小时(2天20小时),看着它自行转动,穿过繁忙的洛杉矶街道,汇入州际高速,避让加州的摩托车手,在德克萨斯的暴雨中稳住车身,最后停在南卡罗来纳州的海滩边。
他从洛杉矶的特斯拉餐厅出发,最终到达南卡罗来纳州默特尔海滩,穿越了24个州。

如果你亲自开过这段行程,就会明白全程的路况有多么复杂。然而从加州的高速公路,到中部的城市街道,再到东海岸的复杂路况,FSD一次性全部搞定了!
天气多变,交通拥挤,甚至夜间驾驶、自动化充电,都没让系统掉链子。
Moss评价说——整个过程中,从未出现过一次险情,即使在人类驾驶员中,这也实属罕见。
对于好奇的网友,Moss表示,你可以登录FSD数据库,验证所有数据。
同时,David Moss晒出了充电记录。注意,在所有站点的停车,也都是由特斯拉FSD自动完成的。

这次横穿美国大陆,不仅体现了FSD V14.2的技术能力,也向整个行业证实——
即使在现实的复杂场景,L4自动驾驶也有可能实现!

十几年前,这样的壮举还只是工程师的技术梦想。

从2016年,特斯拉的FSD系统就开始宣传“零干预横贯美国”的目标。
在发布Autopilot 2.0时,Elon Musk就放话,说2017年底就能实现。
这是一个迟到了八年的承诺,但当它终于兑现时,仍然让人感到吃惊!


一位特斯拉FSD的死忠粉
其实在25年底,David Moss就曾创下纪录。
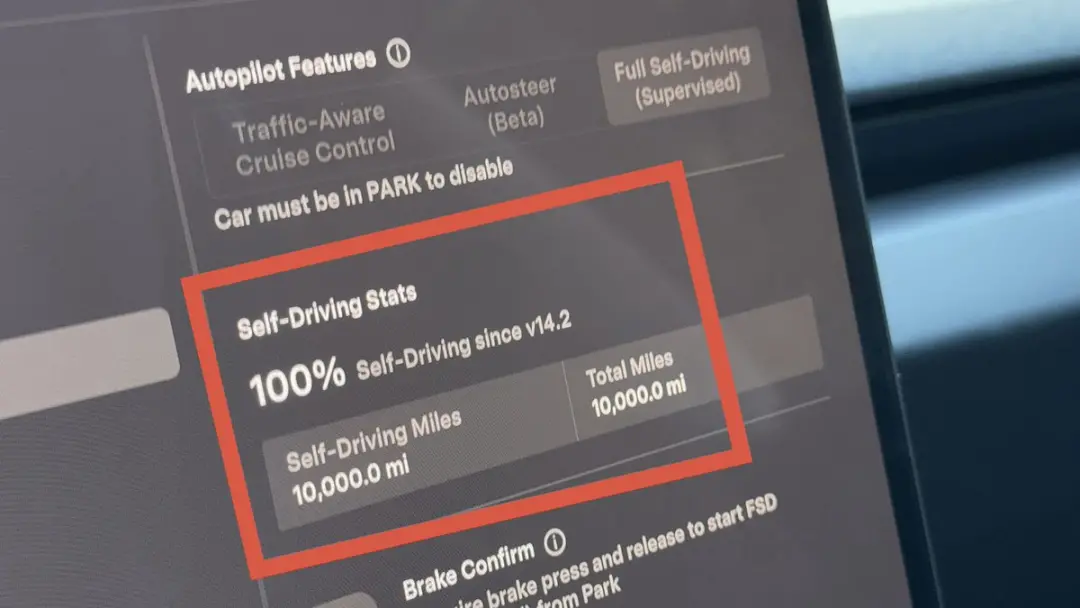
当时,他在特斯拉FSD V14上,连续驾驶了超过10000英里,且全程无干预,实现了真正的100%自动驾驶。

当时的路线图是这样的。

而这个消息出来后,网友们纷纷表示,不可能,这绝不可能!
有人说,自己每天都在用FSD 14.2.2.1,虽然体验很棒,但绝不可能实现完全自动驾驶。
然而David Moss晒出的仪表盘显示,FSD V14千真万确完成了100%的完全自动驾驶。
在去年年底,他就立下宏愿:成为第一个完全依靠FSD用自动驾驶横跨美国(洛杉矶→佛罗里达)的人。
时隔一年,他果然完成了这个目标,实现了一个更宏大的路线图。
这完全出于他对驾驶的热爱,并不是为了炒作。

马斯克:那个“该死的”2017 预言
回到2016年10月。
彼时,马斯克意气风发,豪言:“到2017年底,特斯拉将能够从洛杉矶自动驾驶到纽约,全程哪怕你碰一下方向盘都算我输。”

后来的故事我们都知道了。
2017年过去了,2020年过去了,甚至到了2024年,马斯克不断跳票!
这个承诺就像是一个“永远的明年”。
由于技术路线的反复横跳(从雷达+视觉到纯视觉,从规则代码到神经网络),特斯拉的自动驾驶曾一度陷入瓶颈,甚至被Google旗下的Waymo在无人出租车领域抢尽风头。
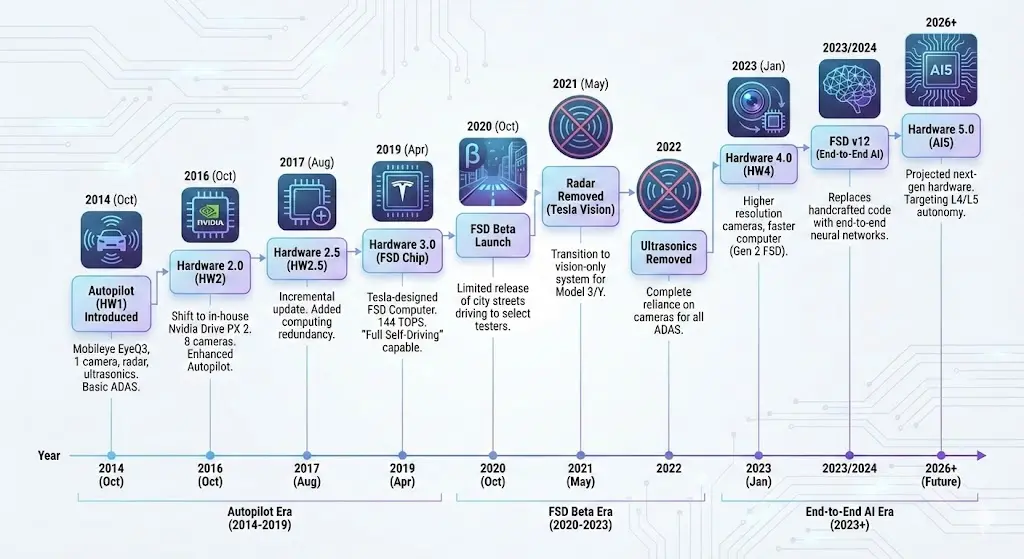
Gemini生成的特斯拉自动驾驶技术路线图
直到FSD V12 版本的出现,特斯拉彻底抛弃了原来的代码逻辑,转向了“端到端”神经网络。
简单说,就是让AI像人类一样,直接通过看视频学会开车,而不是由工程师一行行写代码告诉它“红灯停、绿灯行”。
尽管特斯拉坚信端到端神经网络技术,但这绝非自动驾驶领域的共识方案。
大多数其他自动驾驶研发公司都采用传感器密集型、模块化的驾驶方式。虽然这类系统在初期开发和调试可能更容易,但其复杂性也不容忽视。
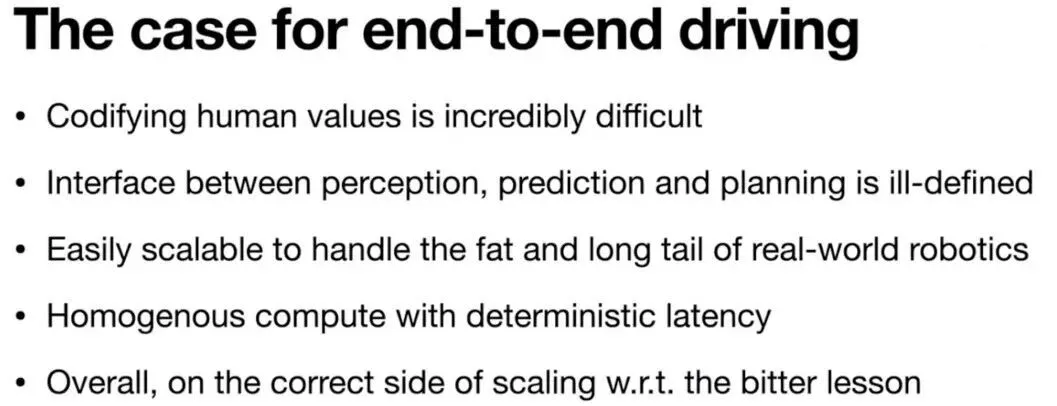
特斯拉AI负责人Ashok Elluswam,在国际计算机视觉大会ICCV介绍了端到端方案的优势:
将人类价值观系统化极其困难,从数据中了解它们则容易得多。
感知、预测和规划之间的接口定义不明确。在端到端架构中,梯度从控制端一直流向传感器输入端,从而整体优化整个网络。
易于扩展,可处理现实世界机器人技术的庞大而长尾需求。
具有确定性延迟的同构计算。
总的来说,相对于过去的苦涩教训,这种方法在规模化方面处于正确的位置。
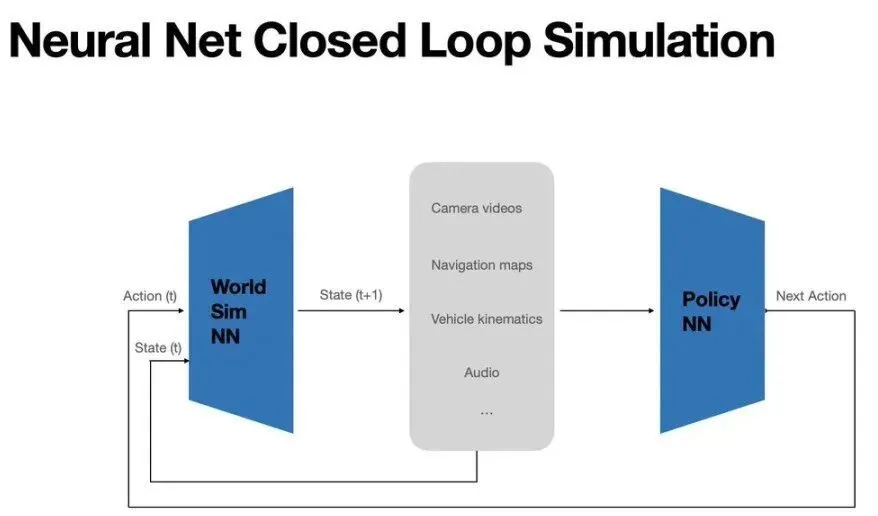
更绝的是,为了自动驾驶数据打造的神经网络“世界模拟器”,同样可以模拟多种真实场景,训练擎天柱。。
而这次“人类零接管”的关键在于“端到端”的最后一块拼图。
在V14之前,特斯拉的AI虽然眼神好使(视觉感知强),但脑子里的地图还是传统的导航模块。
这就好比一个老司机虽然车技好,但他脑子里只有一张死板的纸质地图,一旦遇到修路或者地图没更新,就容易发懵。
而在V14.2中,特斯拉将导航和路径规划也整合进了神经网络。
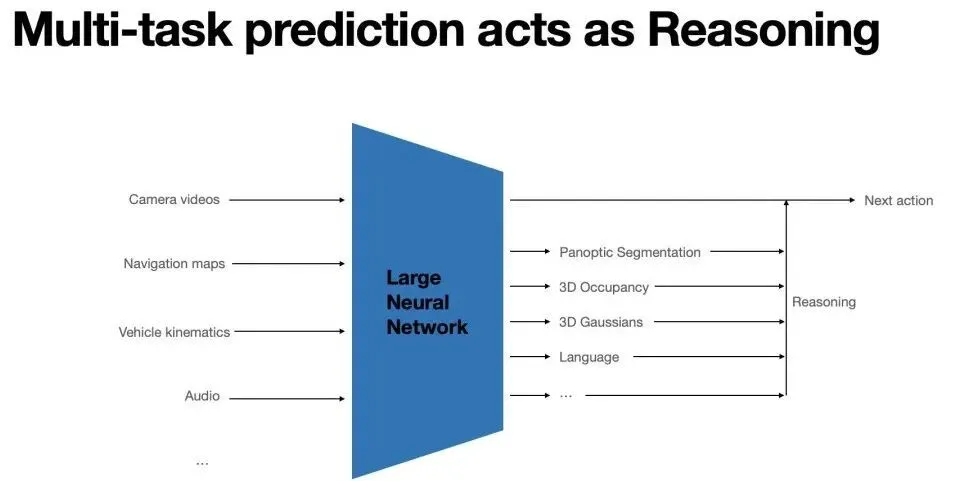
现在的FSD不再是“看着地图开车”,而是像本地人一样,能根据眼前的路况实时理解该怎么走。
一次成功的“零接管”,不等于这套系统已经完美。
统计学告诉我们,如果事故率是万分之一,那么跑一次几千公里的长途可能正好没遇上,但这并不代表它能安全应对几百万辆车的日常通勤。
不过,FSD V14.2的这次表现,最大的意义在于它有力回应了“纯视觉方案无法实现长途全自动”的质疑。
它证明了不需要昂贵的激光雷达,不需要高精地图,仅凭摄像头和算力,AI真的可以处理从繁华都市到荒凉公路的几乎所有场景。
对于普通人来说,这意味着什么?
官方仍是SAE L2(需监督),但车辆完成100%驾驶任务,驾驶员仅作安全监督,完全有可能。
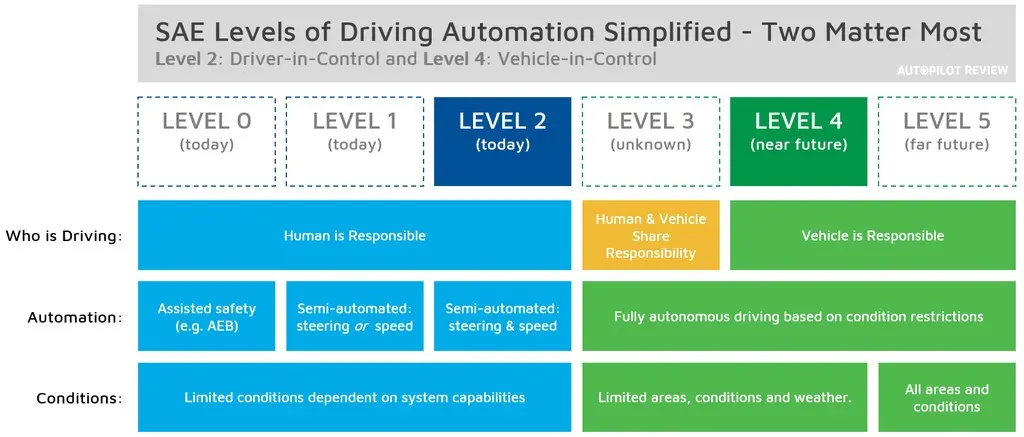
也许,还要等上几个版本,甚至要等到硬件Hardware 5.0的普及,我们才能真正放心地在车里睡大觉。
但看着David Moss那辆横跨大陆的Model 3,那个曾经被嘲笑为“科幻小说”的未来,确实已经把轮胎压在了现实的沥青路上。
